近期,计算智能领域权威机构IEEE Computational Intelligence Society (CIS)公布了2022年度获奖名单(https://cis.ieee.org/getting-involved/awards/2019-cis-award-recipients),华南理工大学自动化科学与工程学院杨辰光教授第一作者发表的工作Robot Learning System based on Adaptive Neural Control and Dynamic Movement Primitives, vol. 30, no. 3, pp.777-787, 2019获得CIS旗舰期刊IEEE Transactions on Neural Networks and Learning Systems(TNNLS)年度唯一最佳论文奖(Outstanding Paper Award)。TNNLS目前的影响因子为10.451,是中科院分区1区的Top期刊。
IEEE(电气与电子工程师协会)是一个由电子工程师、计算机工程师和计算机科学家组成的目前全球最大的非营利性专业技术学会。IEEE计算智能学会(IEEE CIS)前身是成立于1990年的IEEE神经网络理事会(Neural Networks Council),它是专注于人工智能与智能计算领域的国际权威机构。TNNLS是IEEE CIS 旗舰期刊,创刊于1990年,其最佳论文奖设立于1995年。根据2019发布的JCR期刊引证报告,TNNLS位居各小学科的前三甲,均是各学科的Q1区期刊。
获奖论文提出了一种同时考虑运动生成和轨迹跟踪的机器人技能学习系统,其整体框架图如图1所示。在运动生成部分,利用DMP模型来实现运动轨迹的建模和泛化,创新性的将GMR和GMM集成到学习系统中,以提高DMP的学习性能,从而可以从多个演示中提取更多的学习技能,并生成包含这些特征的运动轨迹。为了解决传统的学习系统容易受到环境等不确定性因素影响的问题,获奖论文首次提出将机器人技能学习系统与自适应控制技术相结合,创新性地提出了控制设计与学习系统相结合的跨领域研究新路径框架。这种设计使机器人能够在现实世界中更稳定地执行学习到的技能,其学习控制效果通过多组实验(图2)和(图3)得到了充分验证。

图1 系统框架图


(a) 示教者向机器人传递“倒水”技能 (b) 机械臂对示教技能进行泛化
图2 倒水任务实验
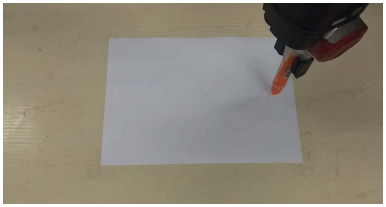
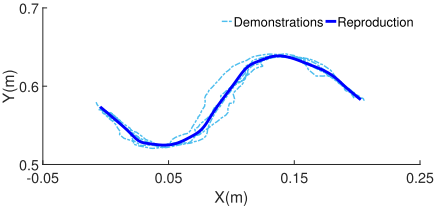 (a) 绘图任务的实验设置 (b) 对示教轨迹进行学习
(a) 绘图任务的实验设置 (b) 对示教轨迹进行学习
图3 绘图任务实验
论文链接:https://ieeexplore.ieee.org/document/8421037
